
Рис. 8.3. Функциональная блок-схема системы VDC
Во-первых, по входным параметрам (воздействиям водителя на органы управления), которые с помощью датчика угла поворота рулевого колеса, датчика дроссельной заслонки и датчика давления в тормозной системе преобразуются в электрические сигналы, определяется номинальное (штатное) поведение автомобиля, описанное номинальными значениями регулируемых переменных. Это наиболее важная и наиболее сложная задача для контроллера системы VDC, так как поведение автомобиля зависит не только от воздействий водителя, но и от неизвестных воздействий окружающей среды, например, от трения между колесами и дорогой, от температуры воздуха и т. д. Кроме того, значения регулируемых переменных должны быть выбраны такими, чтобы поведение автомобиля в критических ситуациях было подобным движению в нормальных условиях.
Во-вторых, по полученным значениям от датчиков скорости колес, датчика рыскания и датчика боковых ускорений определяется фактическое поведение автомобиля, соответствующее фактическим значениям регулируемых переменных. Далее вычисляется и используется разность между номинальными и фактическими значениями переменных величин как набор управляющих сигналов в контроллере системы VDC.
Для реализации задачи управления боковым уводом каждого колеса в отдельности, т. е. при выполнении основной функции системы VDC, необходимо, чтобы тормозное давление на каждом колесе могло модулироваться независимо от водителя и как этого требует заложенная в память ЭБУ—VDC программа управления. Отсюда очевидно важное различие между системами АВС и VDC. Для системы АВС колесо является объектом управления скоростью его вращения, чтобы предотвратить блокировку и сохранить скольжение колеса малым (в пределах допустимой нормы). При этом предотвращается возможность появления и некоторого воздействия поперечной силы. Для системы VDC автомобиль является объектом управления с целью стабилизации движения в критических ситуациях, когда пробуксовкой колес можно и нужно управлять, чтобы получить требуемые поперечные и продольные силы воздействия на движущийся автомобиль.
В критической ситуации, когда автомобиль начинает срываться в движение боковым юзом, ширина полосы скольжения между передними и задними колесами больше ширины автомобиля. Это позволяет выбрать каскадную структуру системы управления, в которой внутренний контур управления с обратной связью управляет пробуксовкой колес, а внешний — движением автомобиля. Такая структура системы управления показана на рис. 8.4.
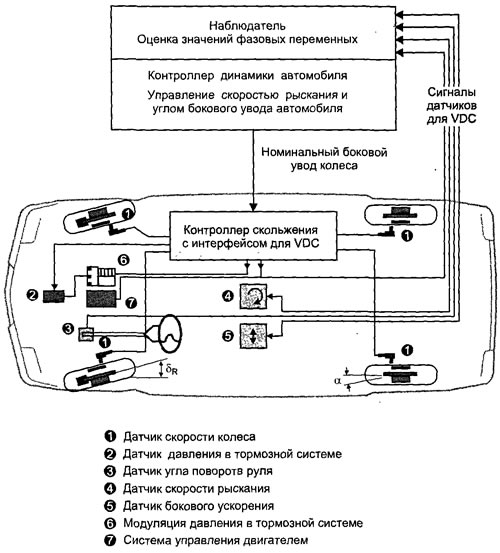
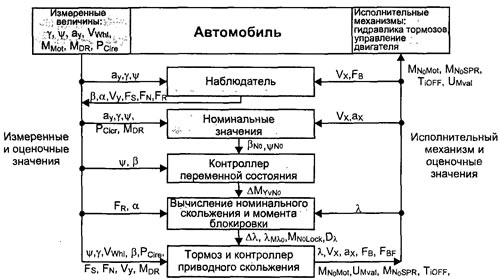
Рис. 8.4. Каскадная структура системы VDC с двумя контурами обратной связи
Во внешнем контуре управления с обратной связью происходит коррекция номинальных значений скольжения колес под требуемое для нештатных условий движения. При этом контроллер скольжения получает сигналы управления от контроллера динамики автомобиля в виде разностных величин между номинальными и фактическими параметрами движения, а также от датчиков автомобиля. Во внутреннем контуре формируются сигналы управления для исполнительных механизмов, с помощью которых корректируется боковой увод колес до номинальных значений скольжения. Наблюдатель используется для того, чтобы оценить фактическое значение угла бокового увода автомобиля и других неизмеряемых величин, например, сил воздействия на колеса, направленных по нормали. Как и в системе АВС, алгоритм управления запрограммирован и хранится в ПЗУ—VDC. Когда система VDC активирована, контроллер скольжения реализует выборку данных из памяти, сравнивает их с текущими значениями, вырабатывает корректирующие сигналы и передает их на исполнительные устройства.
Система управления двигателем реализована как внутренний контур управления с обратной связью. Номинальные значения сигналов, передающиеся к системе управления двигателем по шине CAN-интерфейса, определяют пределы регулирования крутящего момента.