
Испытания автомобиля с системой VDC при резком изменении направления движения
Для оценки эффективности системы VDC проводились модельные и натурные испытания автомобиля во время маневра изменения траектории движения. Сравнивались два однотипных автомобиля, один из которых оборудован системой VDC. Маневр осуществлялся путем резкого поворота рулевого колеса в положительную и отрицательную стороны с шагом 90°. Были приняты следующие начальные условия эксперимента: скорость автомобиля 40 м/с, положение педалей управления тормозом и акселератором во время маневра не изменялось; поверхность дороги однородна (сухой асфальт), коэффициент трения между колесами и дорогой высокий (μ=1,0).
На рис. 8.8, а показаны сравнительные значения наиболее важных переменных величин, анализ которых осуществлялся в процессе моделирования: угол поворота руля (град.), скорость рыскания (град/с), боковое ускорение (м/с2), угол бокового ухода автомобиля (град.). На рис. 8.8, б показана моделируемая траектория движения автомобилей. На рис. 8.8, в выделена характерная часть траектории движения автомобилей и результирующая сила на каждом колесе в контрольных точках этой траектории.
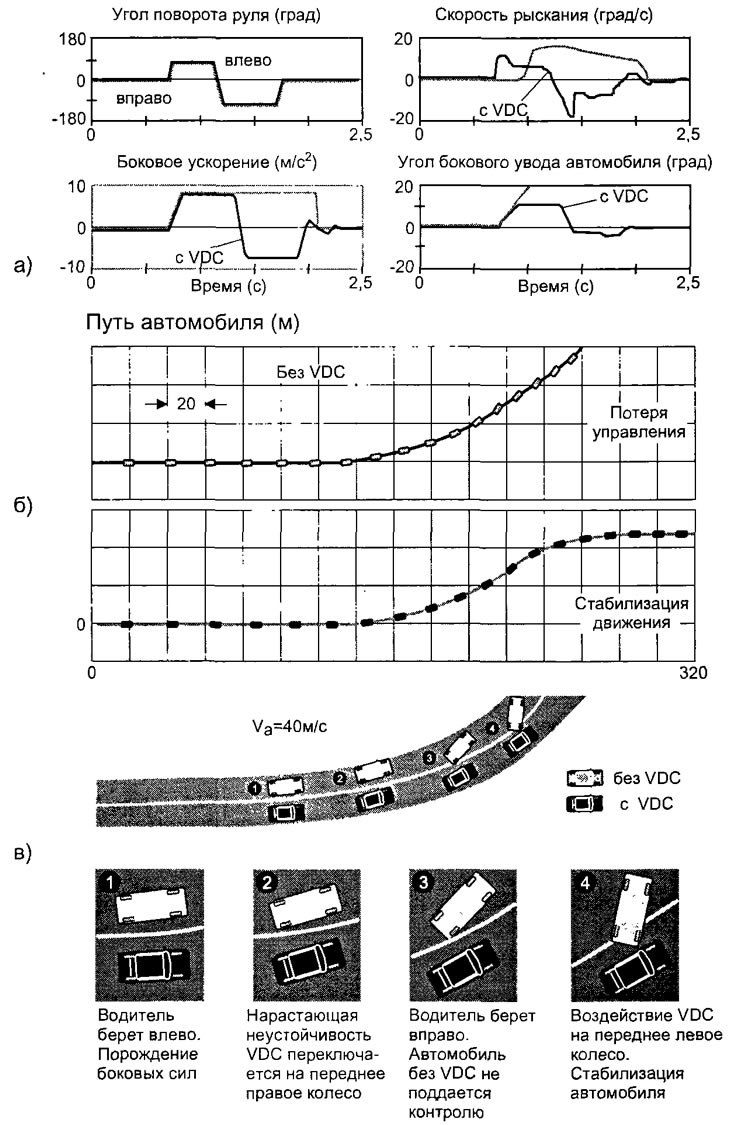
Рис. 8.8. Испытание автомобиля с системой VDC при изменении траектории движения
После первого входного воздействия поворотом рулевого колеса на 90° обычный автомобиль показывает возникающую неустойчивость (на рис. 8.8, в поз. 2), которая следует из-за задержки появления боковой силы на задних колесах (по сравнению с передними). На поз. 3 рис. 8.8, в угол поворота рулевого колеса изменяется в противоположном направлении. Скорость рыскания и угол бокового увода быстро увеличиваются, стабильность автомобиля не восстанавливается, и автомобиль продолжает съезжать с дороги (поз. 4 на рис. 8.8, в).
После первого входного воздействия поворотом рулевого колеса автомобиль с системой VDC также проявляет некоторую неустойчивость. Но при этом система VDC формирует тормозной момент, приложенный к первому переднем колесу (рис. 8.8, с поз. 2), что приводит к повороту результирующей силы на этом колесе и, как следствие, — к замедлению роста скорости рыскания и угла бокового увода (рис. 8.8, а). Автомобиль удерживается от сноса. После второго входного воздействия поворотом рулевого колеса (рис. 8.8, а) скорость рыскания изменяет свой знак, а система VDC формирует тормозной момент на левом переднем колесе и автомобиль снова стабилизируется (рис. 8.8, в поз. 4).
Моделирование было проведено с использованием блока FAS1.M (моделирование динамики автомобиля). Результаты моделирования проверены на испытательном автомобиле.
Торможение при движении автомобиля по гладкому льду
На рис. 8.9 показаны сравнительные характеристики основных параметров движения автомобиля во время полного торможения на гладком льду (μ≈0,15). Испытательный автомобиль для сравнения был оборудован серийными системами ABS и VDC.
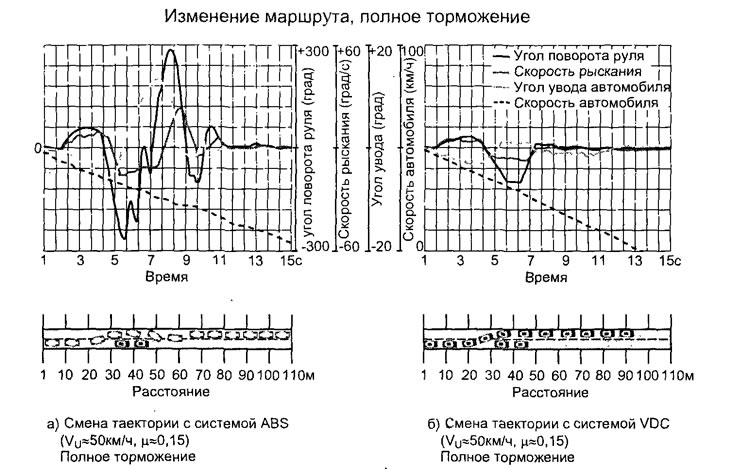
Рис. 8.9. Торможение при движении автомобилей по гладкому льду
На рис. 8.9 слева показаны результаты испытаний с использованием системы ABS, справа — с использованием системы VDC. Маневрирование проводилось при скорости движения автомобиля 50 км/ч с участием водителя в управлении. Результаты испытаний с использованием системы ABS показывают, что скорость рыскания и угол бокового увода автомобиля быстро достигают больших значений и водитель должен быстро этому противодействовать. После очередного маневра рулем скорость рыскания и угол бокового увода автомобиля снова быстро изменяются и снова возникает необходимость во вмешательстве.
Результаты испытаний с использованием системы VDC показывают (рис. 8.9 справа), что скорость рыскания и угол бокового увода автомобиля при торможении изменяются в малых пределах и немедленно откликаются на маневрирование при управлении движением. В этом случае водитель должен успевать задавать дополнительный небольшой угол поворота рулевого колеса в сторону, противоположную уводу, и автомобиль равномерно останавливается. Важно отметить, что при этом тормозной путь автомобиля с системой VDC меньше, чем того же автомобиля с системой ABS. Это объясняется ограничением угла бокового увода автомобиля. чему соответствует лучшая ABS-регуляция.
Испытание автомобиля при движении по замкнутой траектории с увеличением скорости
На рис. 8.10 показаны сравнительные значения основных переменных величин при движении автомобиля по замкнутой траектории с увеличением скорости. Испытания проводились на автомобиле с системой VDC (рис. 8.10, а) и без системы VDC (рис. 8.10, б). При этом водитель должен был удерживать автомобиль на трассе. Трасса однородная, коэффициент трения высокий (μ=1,0).
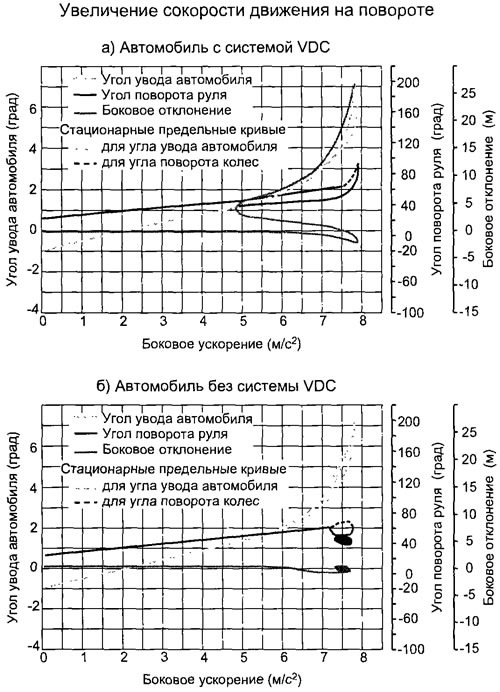
Рис. 8.10. Движение автомобиля по замкнутой траектории с увеличением скорости
На рис. 8.10 штриховыми линиями показаны расчетные значения угла поворота рулевого колеса и угла увода автомобиля, которые являются предельными зависимостями этих величин от медленно увеличивающейся скорости и соответствующего бокового ускорения.
Из рис. 8.10 видно, что поведение автомобиля с системой VDC и без VDC идентично до величины бокового ускорения 7 м/с2 и почти совпадает с расчетным.
При значениях бокового ускорения выше 7 м/с2 начинает быстро расти угол увода автомобиля и угол поворота рулевого колеса. Далее при значениях ускорения 7,5 м/с2 обычный автомобиль становится неуправляемым.
На автомобиле с системой VDC при значениях бокового ускорения выше 7 м/с2 включается система VDC, которая, управляя углом поворота дроссельной заслонки, уменьшает скорость автомобиля, а соответственно, и боковое ускорение до 5 м/с2. При этом угол увода автомобиля и угол поворота рулевого колеса уменьшаются в соответствии с характеристиками на рис. 8.10, а и автомобиль остается управляемым.
Таким образом, динамический диапазон функционирования системы VDC лежит в пределах значений бокового ускорения от 7 м/с2 до 5 м/с2 (в соответствии с рис. 8.10, а).
Возникающие вследствие действия системы VDC незначительные результирующие изменения угла бокового увода автомобиля и его бокового отклонения от трассы легко корректируются действиями водительского управления, что приводит к устойчивому движению автомобиля по замкнутой траектории.
Вышеописанные варианты движения автомобиля потенциально содержат угрозу срыва колес в боковой юз и являются наиболее частыми причинами ДТП для автомобилей, не оборудованных системой VDC. Однако на практике могут иметь место и другие аварийно-опасные варианты движения, например, так называемый «слалом» на заснеженной автомагистрали, когда автомобиль на большой скорости заносит из стороны в сторону.