
Радарные и ультразвуковые датчики
Автомобильные радарные датчики работают на сверхвысоких радиочастотах в диапазоне 20...100 ГГц. Для определения скорости сближения автомобиля с фронтальным препятствием на дороге используется эффект Доплера.
Акселерометры используются в системах безопасности, ABS, навигационных системах, активной подвеске.
Еще в 1969 году фирма Lukas устанавливала экспериментальный доплеровский радиорадар с несущей частотой 24 ГГц на автомобиле Ford Zodiak для получения информации о скорости сближения и расстоянии до объекта перед автомобилем. На поворотах такой радар часто давал ложные сигналы тревоги, когда деревья и дорожные знаки отражали сигнал излучателя.
В современных радиорадарных системах эта проблема решается за счет сложной цифровой обработки сигнала и значительного повышения частоты излучения (в Европе — это 77 ГГц), что дает более высокое разрешение и повышает помехоустойчивость. В радиоизлучателе используется сканирующая антенна или три неподвижных антенны, смонтированные под передним пластиковым бампером. Такие антенны посылают вперед радиолуч с размером растра 3x9° (рис. 2.31). Радиосигналы отражаются от других автомобилей, неподвижных препятствий и обрабатываются в ЭБУ примерно 20 раз в секунду с учетом собственной скорости автомобиля и положения руля. Радар дает информацию о фронтальных препятствиях перед автомобилем, объекты на обочине (деревья и дорожные знаки) не вызывают ложных срабатываний.
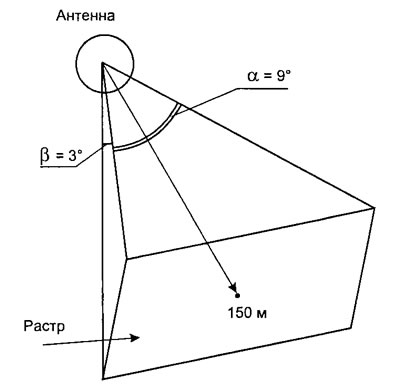
Рис. 2.31. Растр радиоизлучателя
Современные радарные системы обнаруживают препятствия на расстоянии до 150 метров, определяют расстояние до объекта с точностью до 1 метра и скорость сближения с точностью до 1 км/час. Информация о препятствии поступает в ЭБУ, который через исполнительный механизм управляет специальной дроссельной заслонкой, не связанной с педалью водителя, поддерживается безопасная скорость сближения. В случае возможного столкновения ЭБУ использует средства звукового и визуального предупреждения.
На рис. 2.32 представлен радарный датчик АСС для адаптивного круиз-контроля фирмы BOSCH. В блоке размещены приемопередающая антенна диаметром 75 мм, радиорадар с модуляцией частоты, контроллер.
Помимо радиоарадарных датчиков разработаны и уже применяются ультразвуковые датчики сближения.

Рис. 2.32. Радиорадарный датчик АСС с контроллером
Ультразвуковые датчики излучают узконаправленные звуковые волны на частоте 40 кГц. Для определения скорости сближения и расстояния до обнаруженных по отраженному сигналу объектов здесь, как и в радиорадаре, используется эффект Доплера. Скорость распространения звуковой волны (340 м/с при 15°C) зависит от свойств атмосферы.
Датчики ускорения (акселерометры)
Некоторые твердотельные материалы обладают электрической чувствительностью к механическим воздействиям. Такие материалы часто используются для преобразования механических величин в электрические.
На их основе создаются пьезоэлектрические и тензорезистивные акселерометры, которые в автомобильных электронных системах чаще всего используются как датчики ускорения.
Пьезоэлектрические акселерометры
Этот тип датчиков ускорения широко используется для вибрационных измерений, т. к. это точные, надежные и простые устройства. На рис. 2.33 показана базовая конструкция акселерометра, работающая в компрессионном режиме. Чувствительность автомобильных акселерометров составляет около 20 мВ/g.
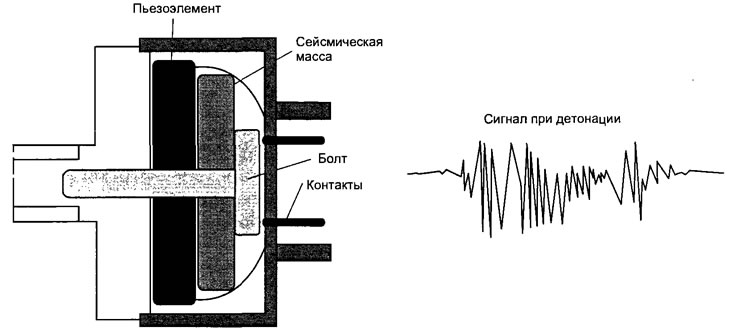
Рис. 2.33. Базовая конструкция акселерометра
При деформации (сжатии) пьезокристалла на его гранях появляется электрический сигнал, пропорциональный в данном случае ускорению. Рабочий диапазон частоты 5...100000 Гц. Для обработки сигнала от пьезоэлектрического датчика используется электронный усилитель-формирователь, собранный по схеме рис. 2.34.
Пьезоэлектрические акселерометры имеют малые размеры и выпускаются в интегральном исполнении. После принятия мер по термокомпенсации эти датчики ускорения имеют погрешность не хуже 0,5% в температурном диапазоне -40...+110°C.
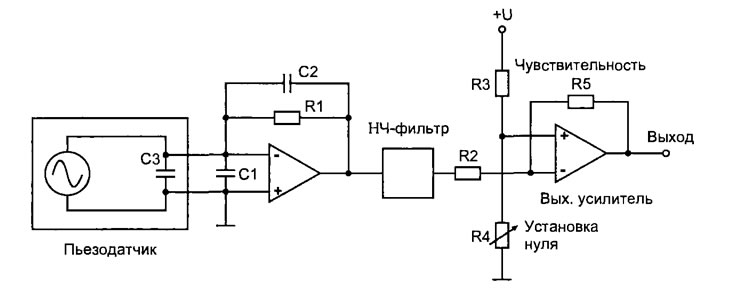
Рис. 2.34. Схема усилителя-формирователя для обработки сигнала пьезоэлектрического акселерометра
Акселерометры для воздушных мешков безопасности
Эти акселерометры являются механическими датчиками инерционного типа. Такие датчики должны располагаться не далее 40 см от места удара. Используются обычно 3—5 датчиков.
Конкретное исполнение инерционных датчиков выбирается производителем системы безопасности, но все они работают по одному и тому же принципу. В обычных условиях движения автомобиля выходные контакты акселерометра разомкнуты, они замыкаются, когда датчик испытывает отрицательное ускорение в диапазоне 15...20 g, что соответствует наезду автомобиля на твердое препятствие со скоростью 12...20 миль в час. Существует несколько конструкций акселерометров, применяемых в системах безопасности, рассмотрим некоторые из них.
Самыми распространенными механическими акселерометрами являются акселерометры с постоянным магнитом. Эта механическая конструкция (рис. 2.35) состоит из чувствительной массы (металлического шара), которая прочно удерживается в задней части небольшого цилиндра мощным постоянным магнитом. Во время обычной езды выходные электрические контакты датчика разомкнуты. При столкновении сила инерции металлического шара преодолевает притяжение магнита, шар катится по цилиндру вперед и замыкает контакты, сигнал поступает в ЭБУ.
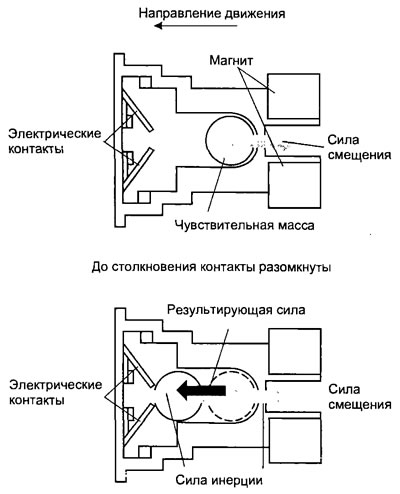
Рис. 2.35. Акселерометр с постоянным магнитом
Динамические характеристики механических акселерометров описываются дифференциальным уравнением 2-го порядка. Такие параметры, как жесткость пружины, масса шарика, сила притяжения магнита, демпфирование и т. д., должны быть увязаны с динамикой автомобиля при ударе. Эти параметры подбирают под конкретную модель автомобиля с учетом его веса, конструкции корпуса, места расположения датчика.
Специальные акселерометры
В последнее время начали применяться интегральные акселерометры на основе полупроводниковых или пьезоэлектрических тензорезисторов. Они малогабаритны, более надежны, программируются, их характеристики воспроизводимы с более высокой точностью. Интегральные датчики располагаются примерно в центре салона. Их чувствительность к ударному ускорению выше, чем у механических. из-за амортизации корпуса. Используется один датчик для фронтального удара с диапазоном±50 g. Могут применяться датчики боковых ударов, пьезорестивные или емкостные. Погрешность менее 5%, частотный диапазон 0...750 Гц.
Акселерометры используются также в активной подвеске для определения изменения нагрузки на колеса. Рабочий диапазон±2 g, погрешность менее 5%, диапазон частот 0...10 Гц.
В некоторых недорогих системах ABS используются акселерометры для определения предельных значений ускорения, при которых возможно проскальзывание колес. Рабочий диапазон±1 g, погрешность менее 5%, диапазон частот 0,5...50 Гц.
Датчик детонации
Датчики детонации используются для обнаружения явления детонации при сгорании рабочей смеси в цилиндрах [1] и [2]. Контроль за детонацией особенно актуален в современных двигателях с высокой компрессией, так как для их эффективной работы угол опережения зажигания близок к предельному, за которым начинается детонация.
Обнаружение детонации можно производить различными способами: измерением давления непосредственно в цилиндре, измерением ионизационного тока через электроды свечи после воспламенения и т. д. На практике используется метод измерения вибрации цилиндров с помощью пьезоэлектрического датчика детонации. На рис. 2.36 схематично показан датчик детонации. Датчик выполнен таким образом, что его резонансная частота совпадает с частотой детонации двигателя (обычно в диапазоне 6...12 кГц). Датчик закрепляется на блоке цилиндров и реагирует даже на слабую детонацию.
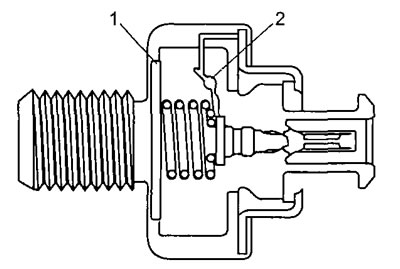
Рис. 2.36. Датчик детонации. 1 - пьезоэлемент, 2 - шунтирующий резистор
При появлении детонации вибрация двигателя приводит к генерации сигнала на выходе датчика (рис. 2.37). ЭБУ двигателя фильтрует сигнал с датчика детонации, производит аналого-цифровое преобразование. После момента зажигания (вероятное время появления детонации) производится сравнение сигнала с датчика детонации с заданным уровнем (рис. 2.38). При обнаружении детонации ЭБУ уменьшает угол опережения зажигания во всех цилиндрах или только в одном. При выходе датчика детонации из строя ЭБУ устанавливает несколько уменьшенное безопасное значение угла опережения зажигания. При исчезновении детонации ЭБУ начинает постепенно увеличивать угол опережения зажигания до появления детонации вновь и т. д. Таким образом ЭБУ с помощью датчика детонации удерживает двигатель в эффективном режиме работы на грани детонации, по без опасности поломок и выхода из строя.

Рис. 2.37. Выходной сигнал датчика детонации
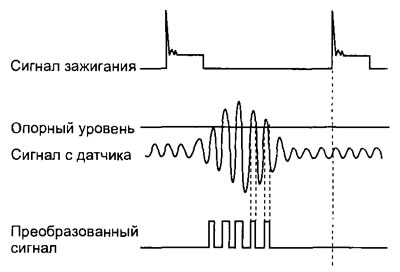
Рис. 2.38. Определение детонации
Датчик содержания метанола в топливе
Для уменьшения содержания токсичных веществ в выхлопных газах автомобиля возможно использование смешанных топлив. Предполагается, что положительный эффект может дать добавление метанола (метилового спирта) к бензину. Проблема состоит в том, что для поддержания стехиометрического состава бензиновой и составной (метаноловой) ТВ-смеси требуется разное количество воздуха.
ЭБУ двигателя должен работать с обеими этими смесями и их комбинацией в различных пропорциях. В этом случае необходим датчик, способный определить процентное содержание метанола в топливе.
Один из вариантов реализации датчика метанола показан на рис. 2.39. Содержание метанола в топливе здесь определяется по электрической емкости, при этом учитывается температура топлива и его электрическое сопротивление. В соответствии с полученным сигналом программное обеспечение ЭБУ выбирает стратегию управления подачей топлива под конкретный состав ТВ-смеси.
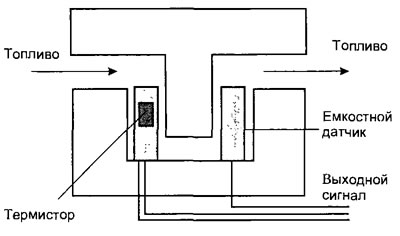
Рис. 2.39. Датчик метанола
Предполагается, что такие датчики найдут в будущем широкое применение в двигателях и с другими альтернативными видами топлива.
Датчики состояния электрических цепей
Состояние электрических цепей современного автомобиля постоянно контролируется ЭБУ. Датчиками состояния служат, как правило, резистивные шунты и делители напряжения, обмотки токовых реле. Например, для того чтобы можно было различить закрытое и открытое состояние ключа от неисправностей в проводке, в его цепь введены дополнительные резисторы (рис. 2.40).
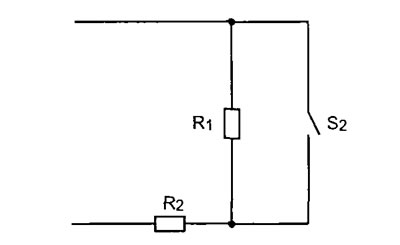
Рис. 2.40. Схема контроля состояния электрической цепи
На схеме исправной проводке соответствует сопротивление R1=1 кОм при разомкнутом ключе и R2=39 Ом при замкнутом. Любые иные значения ЭБУ воспримет как признак неисправности датчика и занесет в память соответствующий код ошибки.
На рис. 2.41 показана схема контроля исправности лампы в фаре.
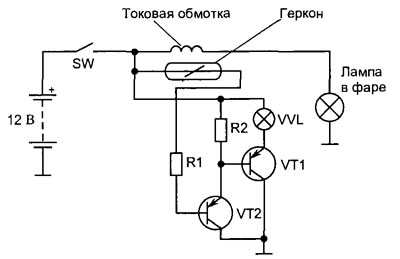
Рис. 2.41. Схема контроля исправности цепи лампы
Интеграция датчиков
Имеется тенденция интеграции автомобильных датчиков и увеличения их возможностей по переработке информации. По степени интеграции (рис. 2.42) датчики условно разделяются на следующие уровни.
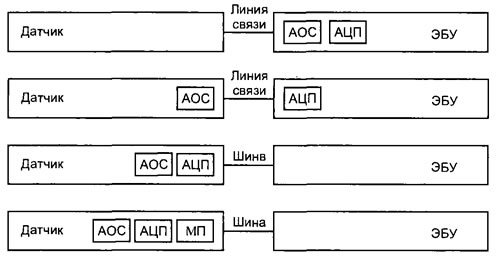
Рис. 2.42. Интеграция датчиков. АОС - аналоговая обработка сигнала, МП - микропроцессор, АЦП - аналого-цифровой преобразователь
- Обычный нулевой уровень. Аналоговый сигнал с датчика передается по линии связи (проводам) в ЭБУ, где и производится вся необходимая обработка. Такой метод наименее помехозащитен.
- Уровень интеграции 1. В датчик включены цепи предварительной аналоговой обработки сигнала, улучшена помехозащищенность.
- Уровень интеграции 2. В датчик помимо аналоговой обработки сигнала встроен аналого-цифровой преобразователь. Датчик может быть подключен к цифровой коммуникационной шине, например CAN, улучшена помехозащищенность, сигнал датчика становится доступным локальной сети контроллеров.
- Уровень интеграции 3. Датчики получают интеллектуальные возможности за счет установки в них микропроцессоров. Цифровой сигнал хорошо помехозащищен, имеются возможности программной установки параметров датчиков под конкретную модель автомобиля, расширены диагностические возможности. Например, датчик положения дроссельной заслонки соответствует обычному уровню, интегральный датчик разрежения во впускном коллекторе соответствует первому уровню интеграции, а радарный датчик скорости и расстояния для целей адаптивного круиз-контроля соответствует третьему уровню.