
Различные датчики ЭСАУ преобразуют информацию о значениях контролируемых неэлектрических параметров в электрический сигнал — напряжение, ток, частоту, фазу и т. д. Эти сигналы преобразуются в цифровой код и поступают в микроконтроллер. Микроконтроллер на основании значений этих сигналов и в соответствии с заложенным в него программным обеспечением принимает решения, управляет через исполнительные механизмы (реле, соленоиды, электродвигатели) объектом.
Возможность совершенствования автомобильных электронных систем во многом зависит от наличия надежных, точных и недорогих датчиков.
В 60-х годах автомобили были оборудованы датчиками давления масла, уровня топлива, температуры, охлаждающей жидкости. Их выходы были подключены к стрелочным или ламповым индикаторам на щитке приборов.
В 70-х годах автомобильные компании начали бороться за уменьшение количества токсичных выбросов из глушителя автомобиля — потребовались дополнительные датчики для управления силовой установкой, которые необходимы для обеспечения нормальной работы электронного зажигания, системы впрыска топлива, трехкомпонентного нейтрализатора, для точного задания соотношения воздух/топливо в рабочей смеси, для минимизации токсичности выхлопных газов.
В 80-х годах начали уделять больше внимания безопасности водителя и пассажиров — появились антиблокировочная система торможения (ABS) и воздушные мешки безопасности.
В силовом агрегате (в ДВС) датчики используются для измерения температуры и давления большинства текучих сред (температура всасываемого воздуха, абсолютное давление во впускном коллекторе, давление масла, температура охлаждающей жидкости, давление топлива в системе впрыска).
Почти ко всем движущимся частям автомобиля подключены датчики скорости или положения (скорость автомобиля, положение дроссельной заслонки, положение коленчатого вала, положение распределительного вала, положение и скорость вращения вала в коробке переключения передач, положение клапана рециркуляции выхлопных газов).
Другие датчики определяют уровень детонации, нагрузку двигателя, пропуски воспламенения, содержание кислорода в выхлопных газах.
В системе управления климатом (в климат-контроле) используются различные датчики в кондиционере для определения давления и температуры хладагента, температуры воздуха в салоне и за бортом.
Есть датчики, которые определяют положение сидений.
После появления антиблокировочной системы торможения и активной подвески потребовались датчики для определения скорости вращения колес, высоты кузова по отношению к шасси, давления в шинах.
Датчики удара и акселерометры нужны для правильного функционирования фронтальных и боковых воздушных мешков безопасности. Для переднего пассажирского сиденья с помощью датчиков определяют наличие пассажира, его вес. Эта информация используется для оптимального наддува мешка безопасности на переднем сидепьи. Другие датчики используются для боковых и потолочных воздушных мешков безопасности, а также специальных воздушных мешков для защиты шеи и головы.
На современных автомобилях антиблокировочные системы торможения заменяются более сложными и эффективными системами управления стабильностью движения автомобиля. Возникает необходимость в новых датчиках. Разрабатываются и уже имеются датчики скорости вращения автомобиля вокруг вертикальной оси, датчики для предупреждения столкновений (например радарные), датчики для определения близости других автомобилей, датчики положения рулевого колеса, бокового ускорения, скорости вращения каждого колеса, крутящего момента на валу двигателя и т. д. Управление тормозной системой автомобиля становится частью более общей и эффективной системы электронного управления курсовой устойчивостью и стабильностью движения.
Из сказанного ясно, что сегодня датчики устанавливаются практически во всех системах автомобиля.
На рис. 2.1, а показано наиболее рациональное расположение различных датчиков на автомобиле.
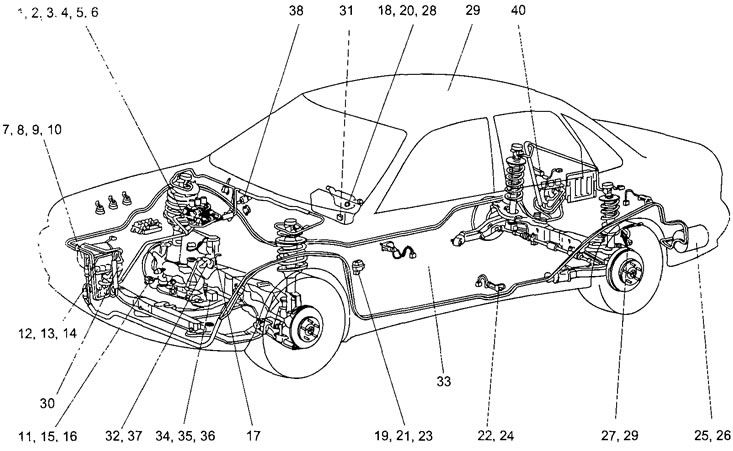
Рис. 2.1, а. Расположение датчиков на автомобиле: 1 - датчик конфигурации впускного коллектора с управляемой геометрией, 2 - датчик тахометра, 3 - датчик положения распределительного вала, 4 - датчик нагрузки двигателя, 5 - датчик положения коленчатого вала, 6 - датчик крутящего момента двигателя, 7 - датчик количества масла, 8 - датчик температуры охлаждающей жидкости, 9 - датчик скорости автомобиля, 10 - датчик давления масла, 11 - датчик уровня охлаждающей жидкости, 12 - радарный датчик системы торможения, 13 - датчик атмосферного давления, 14 - радарный датчик системы предотвращения столкновений, 15 - датчик скорости вращения ведущего вала коробки передач, 16 - датчик выбранной передачи в коробке передач, 17 - датчик давления топлива в рампе форсунок, 18 - датчик скорости вращения руля, 19 - датчик положения педали, 20 - датчик скорости вращения автомобиля относительно вертикальной оси, 21 - датчик противоугонной системы, 22 - датчик положения сиденья, 23 - датчик ускорения при фронтальном столкновении, 24 - датчик ускорения при боковом столкновении, 25 - датчик давления топлива в баке, 26 - датчик уровня топлива в баке, 27 - датчик высоты кузова по отношению к шасси, 28 - датчик угла поворота руля, 29 - датчик дождя или тумана, 30 - датчик температуры забортного воздуха, 31 - датчик веса пассажира, 32 - датчик кислорода, 33 - датчик наличия пассажира в сиденье, 34 - датчик положения дроссельной заслонки, 35 - датчик пропусков воспламенения, 36 - датчик положения клапана рециркуляции выхлопных газов, 37 - датчик абсолютного давления в впускном коллекторе, 38 - датчик азимута, 39 - датчик скорости вращения колес, 40 - датчик давления в шинах
Датчики автомобильных электронных систем можно классифицировать по трем признакам: принципу действия, типу энергетического преобразования и основному назначению.
По принципу действия датчики подразделяют на электроконтактные, потенциометрические, оптические, оптоэлектронные, электромагнитные, индуктивные, магниторезистивные, магнитострикционные, фото- и пьезоэлектрические, датчики на эффектах Холла, Доплера, Кармана, Зеебека, Вигонда.
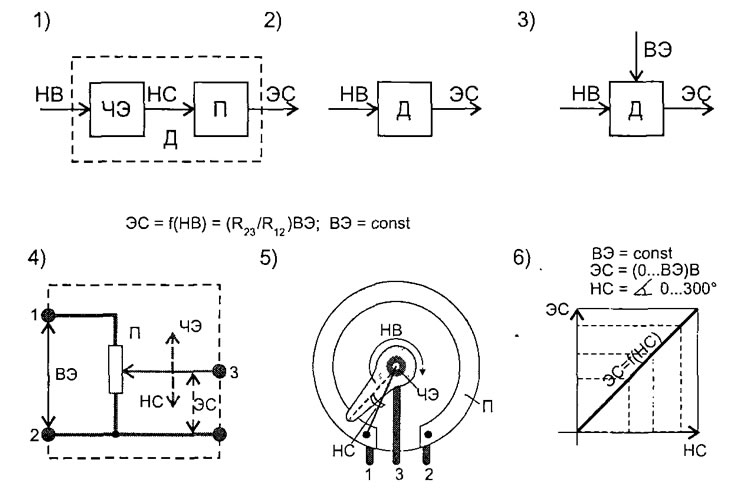
Рис. 2.1, б. Модели датчиков ЭСАУ
В зависимости от энергетического преобразования (рис. 2.1, б) датчики (Д) бывают активными (поз. 2 на рис. 2.1, б), в которых выходной электрический сигнал (ЭС) возникает как следствие входного пеэлектрического воздействия (НВ) без приложения сторонней электрической энергии за счет внутреннего физического эффекта (например фотоэффекта), и пассивными (поз. 3 на рис. 2.1, б), в которых электрический сигнал (ЭС) есть следствие модуляции внешней электрической энергии (ВЭ) управляющим нсэлектрическим воздействием (НВ). Например, потенциометрический датчик, показанный на рис. 2.1, б (поз. 5), является пассивным преобразователем угла поворота оси потенциометра (чувствительного элемента ЧЭ) в электрический сигнал. Электрический сигнал (ЭС) появится на выходе потенциометра только после того, как на резистивную дорожку (П) будет подано внешнее напряжение (ВЭ). Следует отметить, что внутри датчика, посредством чувствительного элемента (ЧЭ), всегда имеет место внутреннее преобразование внешнего неэлектрического Бездействия (НВ) в промежуточный неэлектрический сигнал (НС), что показано на рис. 2.1, б (поз. 1). Применительно к датчику угла поворота, угловое положение оси потенциометра является неэлектрическим сигналом (НС) на выходе чувствительного элемента (ЧЭ). Этому неэлектрическому сигналу (НС) соответствует выходной электрический сигнал (ЭС) датчика, если поданное па резистивную дорожку (П) внешнее напряжение (ВЭ) постоянно (рис. 2.1, б, поз. 4). Линейная характеристика преобразования (рис. 2.1, б, поз. 6) может быть легко изменена на квадратичную, ступенчатую и любую нелинейную с заданной крутизной, что достигается подбором конструктивных размеров (длины, ширины, толщины) резистивной дорожки.
Из приведенного примера ясно, что любой датчик всегда состоит, как минимум, из двух частей — из чувствительного элемента (ЧЭ), способного воспринимать входное неэлектрическое воздействие (НВ), и из преобразователя (П) промежуточного неэлектрического сигнала (НС) от чувствительного элемента в выходной электрический сигнал (ЭС).
По назначению датчики классифицируются по типу управляющего неэлектрического воздействия: датчики краевых положений, датчики угловых и линейных перемещений, датчики частоты вращения и числа оборотов, датчики относительного или фиксированного положения, датчики механического воздействия, датчики давления, датчики температуры, датчики влажности, датчики концентрации кислорода, датчик радиации и др.
Датчики подключаются к ЭВУ или средствам индикации для передачи информации о параметрах контролируемой среды. В автомобильных системах цена и надежность имеют огромное значение и при прочих равных условиях всегда выбирают датчик с наименьшим числом соединителей. Если к датчику следует подключить 5—6 проводов (например, ЛДТ), целесообразно разместить микросхему обработки сигнала непосредственно на датчике и передавать данные контроллеру через последовательный интерфейс.
При подключении датчиков к ЭВУ следует иметь в виду, что шасси (масса) автомобиля не может быть использована в качестве измерительной земли. Между точкой подключения ЭВУ к массе и датчиком напряжение может падать до 1 В за счет токов силовых элементов по массе, что недопустимо как при штатной работе датчика, так и при его диагностике.
Подавляющее большинство датчиков из числа вышеперечисленных уже достаточно широко используется на современных импортных и отечественных автомобилях. Их устройство, работа и принципы диагностирования подробно ниже. Но есть и такие, которые появились относительно недавно и находятся на стадии внедрения в новейшие автомобильные системы. Описанию именно таких датчиков уделено наибольшее внимание в данной главе.