
На рис. 9.10 показана конструкция такого клапана, который разработан и запатентован фирмой FEV МТ (ФРГ) 31.07.1997 года (DE 197.33.186А1, класс: FOIL 9/04, публикация 4.02.1999 г.).
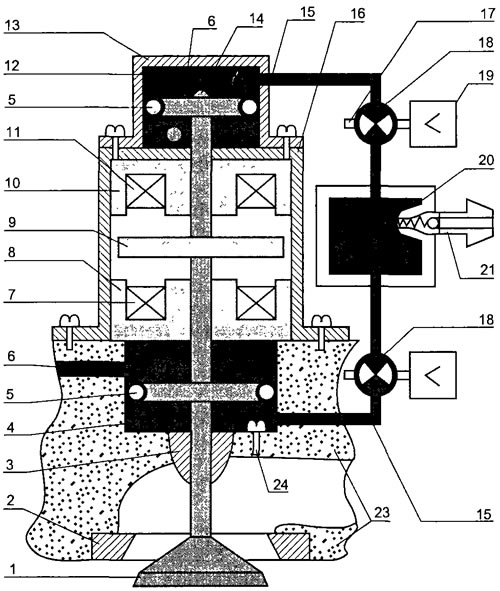
Рис. 9.10. Электромагнитный клапан с пневматическим амортизатором. 1 - газораспределительный клапан; 2 - клапанная фаска; 3 - направляющая втулка; 4 - нижняя пневмокамера; 5 - пневмопоршень с уплотнительным кольцом; 6 - сапунный канал; 7 - обмотка открывающего электромагнита; 8 - магнитопровод открывающего электромагнита; 9 - якорь (подвижная часть) электромагнитного привода; 10 - магнитопровод закрывающего электромагнита; 11 - обмотка закрывающего электромагнита; 12 - верхняя пневмокамера; 13 - корпус верхней пневмокамеры; 14 - клапанный стержень; 15 - пневмонапорный канал; 16 - корпус электромагнитов; 17 - сапун; 18 - пневмоклапан; 19 - электропривод пневмоклапана 18; 20 - пневморесивер; 21 - клапанный штуцер для подачи пневмодавления Рд в ресивер 20; 22 - контакты электрического разъема; 23 - головка блока цилиндра (литье); 24 - датчик управляющего пневмодавления Р в нижней пневмокамере
Электромагнитный клапан с пневмоамортизатором управляется с помощью двух электромагнитов — открывающего 7, 8 и закрывающего 10, 11. Электромагниты работают так же, как и в вышеописанном электромагнитном клапане без возвратной запорной пружины.
Спецификой в данном случае является то, что в конструкции электромагнитного клапана отсутствуют витые упругие возвратные пружины. Их функции выполняет симметричный двухкамерный пневмоа.мортизатор. В двух пневмокамерах — нижней 4 и верхней 12 расположено по одному пневмопоршню 5, которые жестко закреплены па клапанном стержне 14. Между пневмокамерами (снаружи клапана) установлен пнсвморесивер 20, который сообщается с камерами через пневмоклапаны 18, приводящиеся в действие с помощью электроприводов 19. Электроприводы, как и основные электромагниты 7, 8 и 10, 11, управляются от электронной системы автоматического управления двигателем (ЭСАУ-Д) по программе, заложенной в «памяти» ЭСАУ-Д.
Программное управление процессами газораспределения позволяет изменять фазовые параметры клапанов с адаптацией под все возможные изменения условий и режима работы двигателя.
Амортизация механических соударений в электромагнитном клапане реализуется путем управляемого перепускания сжатого воздуха из ресивера 20 в одну из пневмокамер 4 или 12. Стравленный воздух через сапунные каналы 6 и 17 пополняется путем подкачки ресивера от пневмонасоса (на чертеже не показан) через клапанный штуцер 21. Для контроля за величиной управляющего давления Р в нижней пневмокамере 4 установлен датчик 24.
Работа двустороннего ппевмоамортизатора заключается в следующем. Когда клапан 1 открывается электромагнитом 7, 8, нижний ппевмоклапап 18 переходит под управление от ЭСАУ-Д (опосредовано через электропривод 19) и, работая в прерывистом режиме, регулирует управляющее давление Р (по сигналу датчика 24) в нижней пневмокамере таким образом, что поршень 5, а вместе с ним и клапан 1 опускаются вниз со скоростью, заданной по программе управления. При этом, когда притяжение якоря 9 усиливается, управляющее давление Р в нижней пневмокамере 4 становится максимальным и равным давлению Рд в ресивере 20. В этот момент нижний пневмоклапан 18 открывается, давление Рд стравливается через нижний сапун 17 и происходит плавное, без соударений смыкание якоря 9 с магнитопроводом 8, клапан 1 полностью открывается. Во время открытия клапана воздух из верхней пневмокамеры 12 стравливается через сапунный канал 6, а через верхний пневмоклапан 18 и верхний сапун 17 в пневкамеру 12 поступает воздух из атмосферы. При закрытии клапана 1 электромагнитом 10, 11 пневмо-амортизатор работает точно так же, как и при открытии, только в обратном направлении.
Относительным недостатком электромагнитного клапана с пневмоамортизатором является необходимость наличия в его конструкции специального пневмонаcoca и шипящих сапунных каналов. Однако, в случае применения таких газораспределительных клапанов на грузовых автомобилях, оборудованных системой пневматических тормозов, эти недостатки не имеют существенного значения. Фирма FEV МТ намерена использовать свою разработку на дизельных двигателях грузовых автомобилей после 2006 года.