
К таким электродвигателям предъявляются требования высокой эффективности при постоянстве тяговых характеристик, необходимости в периодическом техобслуживании, способности выдерживать перегрузки и загрязнение.
Двигатели переменного тока
Используются трехфазные асинхронные электродвигатели с короткозамкнутым ротором. Обороты двигателя регулируются с помощью контроллера изменением частоты питающего напряжения. Такая конструкция практически не требует обслуживания.
КПД электродвигателя зависит от числа оборотов ротора. Например, двигатель мощностью 7 кВт имеет КПД 97% при 6000 об/мин и 82% при 1500 об/мин, максимальное число оборотов — 15000 об/мин. Момент на валу изменяется при коммутации обмоток статора с треугольника на звезду и обратно. При соединении обмоток статора в треугольник двигатель развивает большие обороты, что необходимо при движении по шоссе, при соединении в звезду увеличивается момент на валу — это нужно при ускорении или во время движения на подъем. Переключение обмоток звезда — треугольник аналогично переключению скоростей в коробке передач. Современный трехфазный двигатель электромобиля GM EVI развивает мощность 137 л. с. в диапазоне 7000...13000 об/мин, имеет момент на валу 150 н·м в диапазоне 0...7000 об/мин.
Электродвигатели постоянного тока
Наряду с трехфазным асинхронным двигателем на современных электромобилях используются электродвигатели постоянного тока с последовательным возбуждением, которые имеют хорошие скоростные и тяговые характеристики. Обороты электродвигателя постоянного тока пропорциональны напряжению питания, что упрощает управление. КПД электродвигателей постоянного тока ниже, чем у двигателей переменного тока, конструкция их сложнее, они нуждаются в регулярном обслуживании, более чувствительны к перегрузкам, максимальные обороты ниже. На электромобилях с двигателями постоянного тока устанавливают многоскоростные механические коробки передач.
В двигателях постоянного тока, используемых на электромобилях, обмотки возбуждения и ротора включены последовательно. При трогании момент на валу такого двигателя большой, но уменьшается с ростом оборотов. Такая характеристика удовлетворительна для езды по городу, но малопригодна для движения по шоссе. Смена полосы может потребовать движения с ускорением, которого электродвигатель обеспечить нс может. Поэтому на некоторых электромобилях используются электродвигатели со смешанным (последовательно-параллельным) включением обмоток возбуждения.
Эффективность двигателей постоянного тока возрастает при замене электрически возбуждаемого статора постоянными магнитами. Дорогостоящие постоянные магниты создают более сильное магнитное поле, чем обмотки статора, двигатели имеют меньшие габариты и массу. Двигатели постоянного тока для электромобилей используются ограниченно и обычно небольшими автосборочными предприятиями.
Бесколлекторные электродвигатели постоянного тока
Такие электродвигатели состоят из ротора на базе постоянных магнитов и трех- или четырехсекционной обмотки на статоре. Электронный коммутатор поочередно возбуждает секции обмотки так, чтобы возникающее магнитное поле постоянно приводило в движение ротор с магнитами. Позиция ротора определяется системой управления с помощью датчика. Преимуществом такого электродвигателя является отсутствие стираемых щеток, искрения в коллекторе, его эффективность и надежность выше, чем у обычных электродвигателей постоянного тока. Недостаток — значительное увеличение стоимости. Бесколлекторные электродвигатели постоянного тока особенно эффективны при езде с высокой постоянной скоростью, поэтому большинство гоночных электромобилей оснащены именно такими двигателями.
Электродвигатели на электромобилях подключены к колесам через механические коробки переключения передач, иногда непосредственно. На рис. 10.4 показано размещение бесколлекторного тягового электродвигателя постоянного тока непосредственно в колесе, разработка компании Tokyo Electric Power Company. Такую конструкцию называют мотор-колесом. В обод колеса вмонтировано кольцо из постоянных магнитов на основе кобальта — самария. Обмотки возбуждения статора жестко связаны с осью колеса. Экспериментальный автомобиль имел привод всех четырех колес. Отсутствие механической передачи сделало управление двигателями слишком сложным.
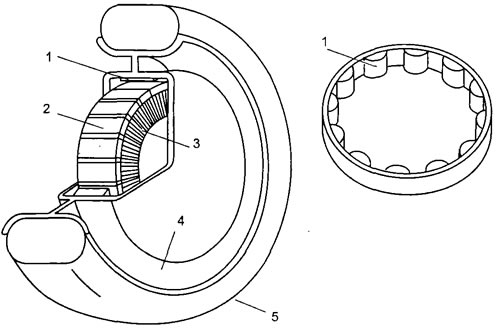
Рис. 10.4. Мотор-колесо на основе бесколлекторното электродвигателя постоянного тока: 1 - ротор с набором постоянных магнитов, 2 - статор, 3 - статорная обмотка, 4 - обод колеса, 5 - шина
Серийная модель Toyota RAV4-EV приводится в движение бесконтактным электродвигателем постоянного тока с напряжением питания 288 В, мощностью 45 кВт в диапазоне 2600...2800 об/мин. Передние колеса ведущие, используется односкоростная коробка передач.
Электроприводные системы
Схемы управления тяговыми электродвигателями регулируют обороты и момент на валу, ограничивают максимальный ток. Используются электроприводы постоянного и переменного тока. По мере появления новых электронных компонентов меняется технология привода, производители электромобилей экспериментируют с различными схемами, добиваясь максимальной эффективности. Основные требования:
- плавное регулирование числа оборотов во всем диапазоне;
- высокий КПД;
- возможность рекуперации при торможении;
- защита от перегрузок и перегрева;
- высокий момент на старте;
- возможность реверса.
В приводах постоянного тока используются традиционные коллекторные электродвигатели с последовательным возбуждением. Обороты регулируются с помощью импульсных преобразователей постоянного напряжения. В бссколлекторных двигателях постоянного тока необходимость в обслуживании значительно уменьшена, они конкурируют с двигателями переменного тока.
Двигатели переменного тока недороги, практически не нуждаются в обслуживании, лучше, чем двигатели постоянного тока, подходят для массового производства. Для их управления нужны сложные трехфазные инверторы, формирующие напряжение переменной частоты. Последние достижения в области силовой электроники удешевляют электропривод переменного тока.
Электропривод постоянного тока
Схема показана на рис. 10.5. Обороты электродвигателя регулируются величиной подаваемого напряжения. Ключи полевые или биполярные, для шунтирования реактивных токов встречно-параллельно транзисторам включены вентили. Ключ VT1 регулирует среднее значение напряжения на клеммах двигателя, т. е. его обороты. Когда VT1 замкнут, напряжение Uпит аккумуляторной батареи подается на двигатель, когда VT1 разомкнут, реактивный ток замыкается через вентиль VD2. Среднее значение напряжения на клеммах двигателя пропорционально коэффициенту скважности (отношение времени замкнутого состояния транзистора VT1 к периоду) преобразователя напряжения на транзисторе VT1.
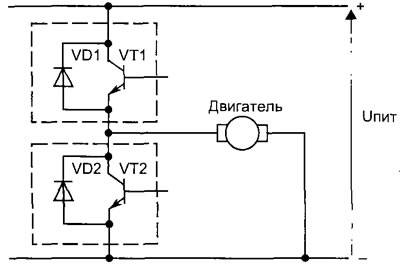
Рис. 10.5. Схема подключения двигателя постоянного тока
В режиме рекуперативного торможения ключ VT1 разомкнут. Электродвигатель работает как генератор и подает зарядный ток на аккумулятор через вентиль VD1. Зарядный ток регулируется коэффициентом скважности преобразователя постоянного напряжения на транзисторе VT2.
Привод бесколлекторных двигателей постоянного тока
Это одно из достижений современной силовой электроники. На роторе электрической машины размешены постоянные магниты, на статоре — обмотки. Для вращения ротора обмотки поочередно подключаются к источнику питания электронным коммутатором. Имеется датчик для определения углового положения ротора. Обмотки статора могут подключаться к шинам питания разной полярности, чем достигается реверс. Коммутирующие транзисторы защищены обратными диодами.
Электропривод переменного тока
Используются трехфазные асинхронные электродвигатели. Для управления оборотами и моментом на валу применяю мой частотой и широтно-импульсной модуляцией.
На рис. 10.6 показана схема подключения электродвигателя к инвертору. Инвертор состоит из трех параллельных ветвей с двумя последовательными ключами в каждой. Ключи зашунтированы обратными диодами для прохождения реактивного тока. Трехфазное напряжение генерируется последовательной коммутацией ключей. Например, ключи 1, 2, 3 замыкаются одновременно, это подключает фазу «с» к положительной шипе аккумулятора, а фазы «а» и «b» — к отрицательной. Одновременное замыкание, например, ключей 1 и 4 недопустимо, так как это закоротит аккумуляторную батарею. Транзисторы включаются со сдвигом 60° но отношению друг к другу. Интервал проводящего состояния для каждого — 180°. Ключи коммутируются в последовательности: 123, 234, 345, 456, 561, 612, 123... При таком алгоритме работы инвертора напряжения на его выходах прямоугольные и регулирование тока двигателя отсутствует.
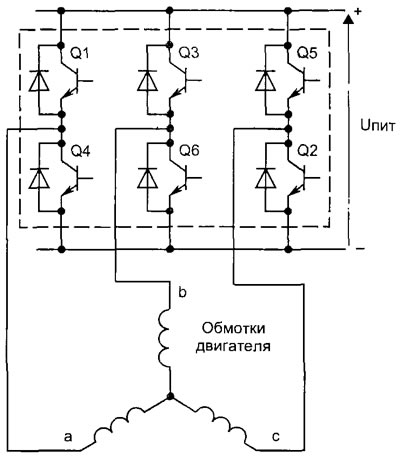
Рис. 10.6. Схема подключения электродвигателя переменного тока к инвертору
Для регулирования тока используется широтно-импульсная модуляция. Синусоидальный сигнал на частоте основной гармоники сравнивается с высокочастотным развертывающим сигналом треугольной формы. Каждый ключ во время своего проводящего состояния (в пределах интервала в 180°) открывается несколько раз, когда напряжение развертки превышает напряжение синусоиды. Обмотка двигателя выполняет роль низкочастотного фильтра, и ток в ней становится близким к синусоидальному с регулируемой амплитудой. КПД приводов переменного тока для электромобилей составляет 85...91%, они хорошо работают при движении электромобиля по городу.
Полупроводниковые ключевые устройства
Основным элементом в приводе постоянного или переменного тока является полупроводниковое ключевое устройство. Для электромобилей с двигателями мощностью 40...45 кВт и многоскоростной коробкой переключения передач ключ должен работать при напряжениях до 200 В и токах до 250 А, для односкоростной коробки передач — до 400...600 В и 400...500 А.
Ключевые элементы в электроприводах работают на частотах 10...20 кГц. Повышенная частота коммутации уменьшает шум в звуковом диапазоне, но увеличивает коммутационные потери, излучение электромагнитных помех. Желательно иметь время переключения ключа менее 1 мкс. В качестве ключевых элементов па электромобилях используются различные электронные устройства:
- Тиристоры давно применяются в приводах, выдерживают большие токи и напряжения, имеют относительно низкое напряжение в открытом состоянии. Не отключаются по цепи управления, их отключение на постоянном токе требует наличия сложных дополнительных электрических схем.
- Запираемые тиристоры отключаются по цепи управления, но работают в узком частотном диапазоне 1...5 кГц, напряжение в открытом состоянии больше, чем у обычных тиристоров. Энергия, подаваемая в цепь управления, также больше, что увеличивает потери мощности.
- Биполярные транзисторы работают в широком диапазоне частот, токов и напряжений. Обычно выполняются в виде транзисторных модулей для увеличения коэффициента усиления по току. В приводах современных электромобилей чаще всего используются именно биполярные транзисторы.
- Мощные полевые транзисторы (MOSFET) управляются напряжением, а не током, как биполярные транзисторы или тиристоры, это упрощает цепи управления. Работают в широком диапазоне частот. Недостатки: большое напряжение насыщения и чувствительность к перегреву.
- Биполярные транзисторы с изолированным затвором (БТИЗ — IGBT) — это биполярные транзисторы с полевыми транзисторами в цепи управления. Управляются напряжением. Напряжение насыщения и цена выше, чем у обычных транзисторных модулей. Сочетание широкого диапазона рабочих частот, токов, напряжений с возможностью управления напряжением делает БТИЗ перспективными для применения на электромобилях. Однако стоимость их пока достаточно высокая.
- Тиристоры с цепями управления на полевых транзисторах (МСТ — MOS Controlled Thyristor). МСТ-тиристор включается и отключается по цепи управления напряжением. Имеет широкий диапазон частот, токов и напряжений, перспективен для применения на электромобилях.
В табл. 10.2 приведены параметры ключевых устройств, применяемых в электроприводах на электромобилях.
Таблица 10.2
| Биполярные транзисторы | Полевые транзисторы | БТИЗ | МСТ-тиристоры | |
| Рабочий диапазон | 1200 В, 800 А | 500 В, 50 А | 1200 В, 400 А | 600 В, 60 А |
| Чем управляется | Током | Напряжением | Напряжением | Напряжением |
| Напряжение на открытом ключе, [В] | 1,9 | 3,2 | 3,2...1,7 | 1,1 |
| Частота, [кГц] | 10 | 100 | 20...40 | 20 |
| Di/dt, [А/мкс] | 100 | Большое значение | Большое значение | 1000 |
| Время включения | 1,7 мкс | 90 нс | 0,9 мкс | 1,0 мкс |
| Время отключения | 5 мкс | 0,14 мкс | 200 нс...1,4 мкс | 2,1 мкс |
Коробки переключения передач для электромобилей
На электромобилях используются коробки переключения передач (КПП), примерно такие же, как на автомобилях с ДВС. Эффективность привода электромобилей зависит от оборотов. Двигатель переменного тока обычно имеет КПД не менее 80% в диапазоне 2000...12000 об/мин, двигатель постоянного тока с последовательным возбуждением — 70% в диапазоне 2000...5000 об/мин. Бесколлекторный двигатель постоянного тока имеет КПД больше 85% в диапазоне 3000...8000 об/мин.
Большинство конструкций электродвигателей имеют постоянный момент на валу в диапазоне от 0 до 4000...5000 об/мин, при более высоких оборотах момент падает. Это значит, что при скоростях 65...105 км/час электромобиль плохо ускоряется, при движении по шоссе это опасно.
Приведенные примеры показывают, что для эффективной работы электродвигатель должен иметь обороты более 2000...3000 в минуту, с другой стороны, колесо автомобиля на скорости 105 км/час делает только 500 оборотов в минуту. Вот почему, несмотря на электронное управление приводом, большинство электромобилей имеют механические коробки переключения передач с диапазоном передаточных отношений 4:1...8:1.
В электромобилях с КПП используется обычная автомобильная технология, когда ведущие колеса соединяются с валом двигателя через дифференциал и ручную или автоматическую коробку передач. На многих электромобилях, переделанных из обычных автомобилей, вместо ДВС устанавливается электродвигатель, коробка передач не меняется. Тем не менее многоскоростные коробки передач устанавливаются и на конструктивных (не переделанных) электромобилях. Например, электромобиль Fiat Panda Electric с двигателем 9,2 кВт имеет ручную коробку передач с четырьмя передними и одной задней скоростями.
Многоскоростные КПП устанавливаются совместно с электродвигателями постоянного тока с последовательным возбуждением, имеющими удовлетворительный КПД в относительно узком диапазоне оборотов. Коробка переключения передач в этом случае позволяет лучше согласовать характеристики электродвигателя с дорожными условиями.
Односкоростные КПП применяются совместно с электродвигателями, эффективно работающими в широком диапазоне оборотов (например, двигатели переменного тока). В этом случае для согласования характеристик двигателя с дорожными условиями достаточно одной понижающей передачи. На автомобилях, изначально спроектированных как электромобили, применяются именно такие передачи. Например, на модели Ford Ranger EV трехфазный электродвигатель встроен непосредственно в передний ведущий мост. На рис. 10.7 показан бесколлекторный двигатель постоянного тока с максимальным числом оборотов 7500 об/мин, встроенный в ведущий мост, с передаточным отношением 7,5:1.
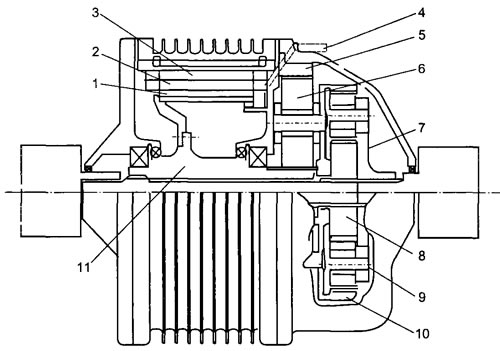
Рис. 10.7. Ведущий мост со встроенным электродвигателем. 1 - постоянный магнит, 2 - статор, 3 - магнитная цепь, 4 - электрические провода, 5 - коронная шестерня, 6 - планетарная передача, 7 - планетарный дифференциал, 8 - выход дифференциала на левое колесо, 9 - выход на правое колесо, 10 - вход дифференциала, 11 - полый вал
Непосредственный привод
В электромобилях желательно подключать колеса непосредственно к электродвигателю без механических передач, что упрощает механическую конструкцию. Но такая схема требует сложных алгоритмов управления и ухудшаются ездовые характеристики электромобиля. Типичный пример реализации привода «мотор-колесо» приведен на рис. 10.4. Характеристики непосредственного привода могут быть улучшены возможностью коммутации обмоток трехфазного двигателя из звезды в треугольник и обратно, а для коллекторного двигателя постоянного тока — переключением обмоток возбуждения, последовательной и независимой.