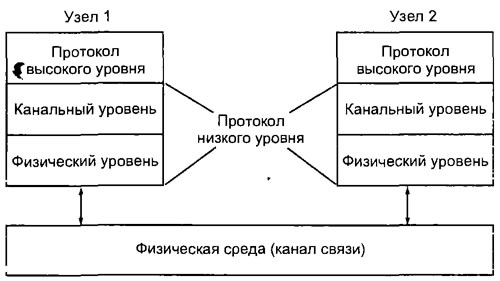
Рис. 6.23. Протокол низкого уровня
На канальном уровне определяются функции, необходимые для надежной и эффективной передачи данных между узлами одной и той же сети. Это адресация, организация кадров, обнаружение ошибок во время обмена данными в сети.
На физическом уровне определяют электрические, механические и прочие физические характеристики интерфейса для подключения узла в сети. Рассматриваются вопросы спецификации шинных соединителей, сетевых адаптеров, кодирования, синхронизации и т. д.
Различные приложения предъявляют разные требования на физическом уровне, при этом основными параметрами при проектировании являются:
- скорость и расстояние передачи данных но шине;
- надежность;
- электромагнитная совместимость;
- соответствие стандартам и рекомендуемой практике;
- шинная топология.
Канал связи (электрические провода или оптические кабели) находится ниже физического уровня и в модель ВОС не входит (рис. 6.23).
Примерами протоколов низкого уровня, разработанных специально для автомобильной промышленности, являются: CAN (controller area network — Bosch, Intel), VAN (vehicle area network — Renault, Peugeot), VNP (vehicle network protocol — Ford). В локальных сетях персональных компьютеров часто применяется протокол Ethernet, который в автомобильных системах нс используется.
При рассмотрении протоколов низкого уровня канальный и физический уровни модели ВОС дополнительно разделяются на подуровни, что позволяет рассматривать происходящие процессы подробнее (рис. 6.24).
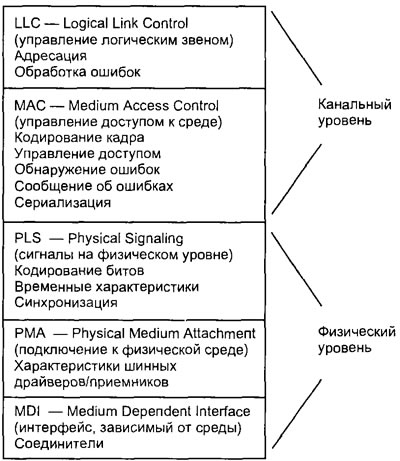
Рис. 6.24. Подробное представление нижних уровней
Канал связи
Канал связи физически соединяет узлы, участвующие в обмене данными при передаче сигналов электрическим, оптическим или иным методом. Ниже приводятся примеры реализации каналов связи в порядке возрастания их стоимости:
- одиночный провод;
- два провода;
- витая пара;
- экранированная витая пара;
- коаксиальный кабель;
- оптический кабель;
- инфракрасное излучение;
- радиоканал.
Инфракрасное излучение и радиоканал для передачи данных по шине внутри автомобиля в настоящее время не применяются. Устройства с такими передающими каналами используют для обмена данными между автомобилем и внешней средой, например: дистанционное отпирание замков на дверях, включение охранной сигнализации, получение дорожной информации, предупреждение о столкновении и т. д.
Оптические линии связи также пока не находят применения в автомобильных мультиплексных системах. Оптические кабели, способные эксплуатироваться в температурном режиме, характерном для автомобиля, стоят дорого, кроме того, с их помощью трудно реализовать сети с шинной топологией (звездообразная или кольцевая топология реализуется проще).
Сегодня в автомобильных мультиплексных системах информация передается, как правило, по проводам.
Однопроводная схема используется при низких скоростях обмена, не более 10...20 Кбит/сек. При более высоких скоростях передачи данных применяются витые пары и экранирование, при этом уменьшается паразитное электромагнитное излучение.
При высоких скоростях обмена и малой мощности сигнала целесообразно применение коаксиального кабеля. При этом важно учитывать удельные электрические характеристики канала связи, такие как: сопротивление (Ом/м), затухание (dB/м), задержку распространения (нс/м), допустимую максимальную длину линии. Учитывается также маршрут прокладки линии связи в автомобиле и максимальная длина отводов к узлам (для шинной топологии).
На рис. 6.25 показано примерное соотношение между стоимостными и эксплуатационными характеристиками различных линий связи.
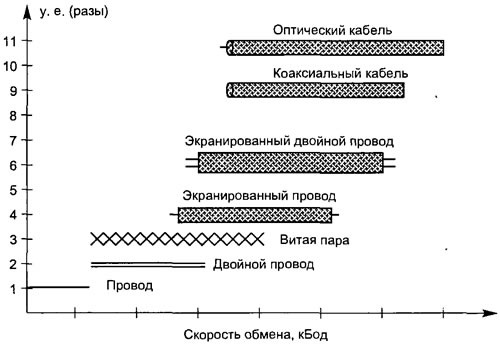
Рис. 6.25. Стоимостные и эксплуатационные характеристики различных линий связи
Подуровни MDI и РМА
В автомобильных мультиплексных системах сигналы передаются на относительно высокой частоте и имеют малую мощность. С учетом этого для соединителей (разъемов) важными параметрами на подуровне MDI являются переходное сопротивление контактов, максимальная частота канализации, возможность подключения экрана. На подуровне РМА физического уровня определяются характеристики шинных драйверов (формирователей) и приемников.
Емкость передающей линии и токоформирующая способность источника сигналов ограничивают длину линии, при которой возможна надежная передача. Так, ТТЛ-формирователь может надежно работать в линии, длина которой не превышает 70 см. Для расширения диапазона передачи используются специализированные интегральные микросхемы — линейные формирователи (драйверы) и линейные приемники (сетевые адаптеры). Эти устройства подключаются к линии.
Выпускаются разные типы формирователей: шинные формирователи RS-232 для однопроводной линии, которые имеют низкую скорость передачи (менее 20 Кбит/сек) и небольшую допустимую длину для линии (менее 15 м); дифференциальные формирователи RS-485, обеспечивающие высокую скорость передачи данных (до 10 Мбит/сек) и длину линии до 1 км.
Сигналы на физическом уровне (подуровень PLS)
На подуровне PLS рассматриваются вопросы представления битов, синхронизации, двоичное кодирование.
Когда компьютеры и терминалы разделены большими расстояниями, является экономически более выгодным ввести временную настройку в сам сигнал, вместо того чтобы использовать отдельный канал синхронизации. То есть мы пришли к понятию так называемого самосинхронизируюшего кода. При использовании кодов, не являющихся самосинхронизирующими, возникает проблема, состоящая в том, что синхросигнал и данные могут быть изменены, когда распространяются по отдельным каналам. Синхросигнал ускоряется или замедляется относительно информационного сигнала, что означает, что у приемника возникают трудности с настройкой на прием информационного сигнала, его захватом.
При использовании самосинхронизируюшего кода принимающее устройство может периодически проверять себя, чтобы убедиться в том, что оно опрашивает линию точно в тот самый момент, когда некоторый бит поступает в приемник. Это требует (в идеальных условиях), чтобы линия очень часто меняла свое состояние. Самые лучшие синхронизирующие коды — это те, при использовании которых состояние линии часто меняется, поскольку эти изменения состояния (например, перепад напряжения) позволяют приемнику продолжать настраиваться на сигнал.
Идея заключается в том, чтобы иметь код с регулярными и частыми изменениями (переходами) уровней сигнала в канале. Переходы осуществляют разделение двоичных элементов данных (единиц и нулей) в приемнике, и логические схемы постоянно отслеживают изменения состояния для того, чтобы выделять единицы и нули из потока битов для целей настройки. Стробирование обычно производится приемником с более высокой скоростью, чем скорость изменения данных, для того чтобы более точно определить элементы данных.
На рис. 6.26 показаны способы представления битов в системах кодирования, применяемых в мультиплексных сетях. Здесь Т — время для представления одного бита. Заметим, что реальные сигналы не являются такими прямоугольными, с крутыми фронтами, как показано на рис. 6.26.
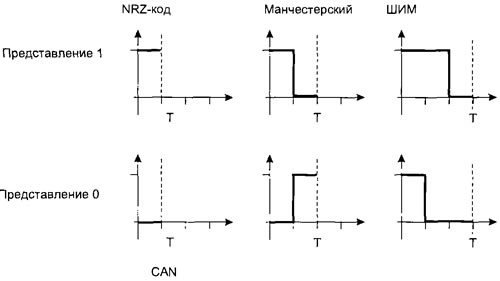
Рис. 6.26. Примеры кодирования бита
Для кода без возвращения к нулю (NRZ-код) уровень сигнала остается постоянным для каждой последовательности одноименных битов. В этом случае уровень сигнала остается низким для бита 0 и возрастает до некоторого высокого уровня напряжения для бита 1 (во многих устройствах для 0 и 1 используются противоположные по полярности значения напряжения). Код NRZ широко используется для передачи данных вследствие своей относительной простоты и низкой стоимости. NRZ-код обеспечивает очень эффективное использование полосы частот, поскольку он может представлять бит для каждого бода (изменения сигнала). Однако его недостатком является отсутствие способности самосинхронизации, поскольку длинные серии идущих подряд единиц и нулей не приводят к изменениям состояния сигнала в канале. Вследствие этого может произойти рассогласование (дрейф) таймера приемника по отношению к поступающему сигналу и несвоевременный опрос линии, передатчик и приемник могут фактически утратить взаимную синхронизацию. NRZ-код может быть полярным и биполярным в зависимости от конкретной реализации.
Код с возвращением к нулю (RZ-код) предусматривает, что в представлении каждого бита сигнал меняется по меньшей мере один раз. Поскольку RZ-коды обеспечивают изменение состояния для каждого бита, эти коды обладают очень хорошими свойствами синхронизации. Основной недостаток RZ-кода состоит в том, что он требует двух переходов (изменений) сигнала для каждого бита. Следовательно, RZ-код потребует вдвое большей скорости (в бодах) по сравнению с обычным кодом. В качестве примера RZ-кодов на рисунке 6.26 показаны манчестерский код и широтно-импульсная модуляция.
В автомобильной мультиплексной шине CAN используется NRZ-код.
Управление доступом к среде (подуровень МАС)
Локальные сети обычно являются равноранговыми, то есть статус всех узлов одинаковый, они имеют равные права на доступ в сеть. С другой стороны, только один узел может передавать данные в сеть в любой конкретный момент времени. Необходим механизм для контроля за доступом к шине (среде), который и реализуется на подуровне МАС.
Метод доступа CSMA/CD (Carrier Sense, Multiple Access with Collision Detection) — метод множественного доступа с контролем несущей и обнаружением коллизий.
Если то или иное устройство готово к передаче данных в сеть, оно выдает на шину запрос для проверки того, не передаются ли уже по сети какие-либо данные. Если сеть занята, контроллер ожидает в течение некоторого произвольного интервала времени, прежде чем выполнить еще одну попытку передать данные. Если линия сети все еще занята, контроллер будет ожидать несколько дольше до следующей попытки. Поскольку каждый контроллер в сети ожидает в течение произвольного, случайно выбранного интервала времени, вероятность того, что все устройства примут с шины предназначенные для них сообщения, возрастает.
Для того чтобы исключить столкновения, контроллер, передавая данные, непрерывно контролирует состояние шины. Если контроллер обнаруживает, что на шине уже имеются данные, передаваемые не им, он приходит к заключению, что столкновение, скорее всего, уже произошло, и приостанавливает передачу. Поскольку и тот контроллер, который передал данные, вызвавшие столкновение, постоянно запрашивает шину, он тоже прекращает передачу. Оба контроллера после этого ожидают в течение произвольного интервала времени, прежде чем попытаться снова передать весь блок данных. Выбранная в случайном порядке длительность периода ожидания повышает вероятность того, что оба контроллера смогут передать данные через сеть без повторного столкновения. Если оно все же происходит, средняя длительность периода ожидания увеличивается.
Метод доступа CSMA/CD-A отличается от CSMA/CD наличием арбитража при коллизиях, что используется в CAN, VAN, VNP и в других автомобильных шинных протоколах.
Каждый пакет данных, передаваемый по сети, снабжается приоритетом. Если несколько узлов одновременно пытаются вести передачу данных, узлы, передающие данные с более низкими приоритетами, обнаружат коллизию и прекратят передачу. Узел, данные с которого имеют наивысший приоритет, продолжит передачу.
Пропускная способность сети с побитным арбитражем при коллизиях теоретически может использоваться на 100%. На практике это недостижимо из-за задержки передачи пакетов данных с низким приоритетом.
Недостатком метода доступа CSMA/CD является прекращение передачи всех сообщений при обнаружении коллизии. Метод CSMA/CD-A позволяет продолжить без остановки передачу наиболее важной информации.
Реализация метода CSMA/CD-A предусматривает, что время задержки для всей линии связи составляет малую часть от времени передачи одного бита информации. Это ограничивает максимальную длину линии для заданной скорости передачи. Например, максимальная длина электрической линии для реализации CAN-протокола со скоростью передачи 1 Мбит/сек не более 40 метров.
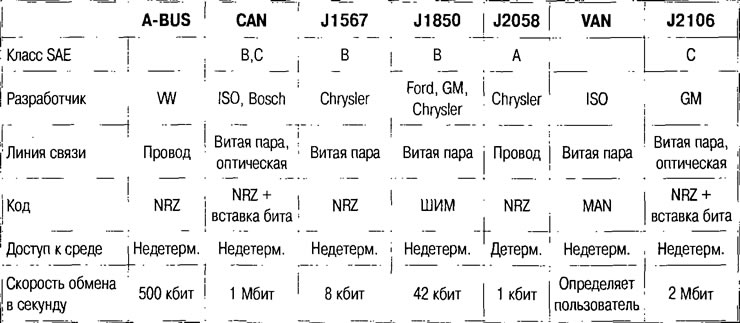
Обмен данными в автомобильных мультиплексных системах может производиться по различным протоколам, которые сведены в табл. 6.2.
Таблица 6.2