
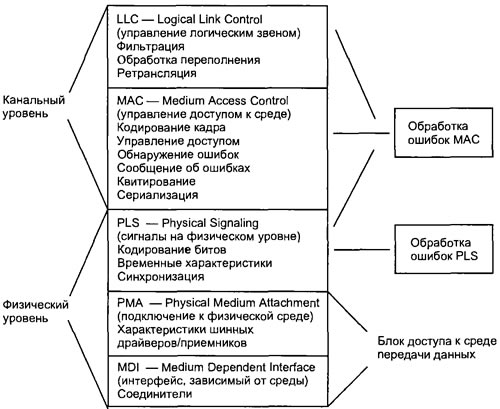
Рис. 7.1. Уровневая архитектура CAN
На физическом уровне определяются электрические характеристики соединителей, шинных адаптеров, двоичное кодирование, синхронизания.
Физический уровень разделен па три подуровня:
- MDI (medium dependent interface) — подуровень интерфейса, зависимого от физического носителя (передающая среда);
- РМА (physical medium attachment) — подуровень подсоединения к физической среде;
- PLS (physical signaling) — сигналы на физическом уровне.
На канальном уровне определяется формат кадра, обнаружение и передача ошибок во время трансляции, автоматическая ретрансляция данных, фильтрация. Канальный уровень разделен на два подуровня:
- MAC (medium access control) — управление доступом к среде;
- LLC (logic link control) — управление логическим каналом.
Физический уровень контролируется функцией супервизора «контроль шины», например, выявляются короткие замыкания или обрывы на линии.
Канальный уровень контролируется функцией супервизора «ограничение распространения последствий неисправности», например, различаются кратковременные сбои и долговременные неисправности.