
Механические прототипы навигационных систем появились в США в 1910 году, когда автомобили начали производиться в больших количествах, а дороги еще не были размечены. Например, в навигационной системе Chadwick Road Guide металлический диск с отверстиями вращался синхронно с пройденным путем. Отверстия отмечали перекрестки на маршруте. К дорожкам на диске пружинами прижимались специальные молоточки. При попадании молоточка в отверстие устройство издавало звонок, и специальный рычажок с кодированным символом указывал водителю, какое необходимо выполнить действие.
Точность и надежность таких навигационных систем были низкими, их перестали использовать после стандартизации дорожных знаков в 20-х годах и введения разметки дорог.
В 60-х годах автомобильные компании вновь начали проявлять интерес к навигационным системам. В 1987 году Toyota начала их устанавливать на серийные модели как опцию. В 1994 году в США, Европе, Японии уже было продано более 500000 автомобильных навигационных систем.
Функции, структура и составные компоненты навигационной системы
На рис. 5.14 показана структура навигационной системы. Система может осуществлять навигационное счисление, определять положение автомобиля на карте местности по конфигурации пройденного пути, определять абсолютные координаты с помощью спутниковой системы GPS (глобальная позиционирующая система или GPS — Global Positioning System). С помощью навигационного счисления определяют относительное положение автомобиля и направление движения по информации, полученной с датчиков скорости вращения колес и азимута.
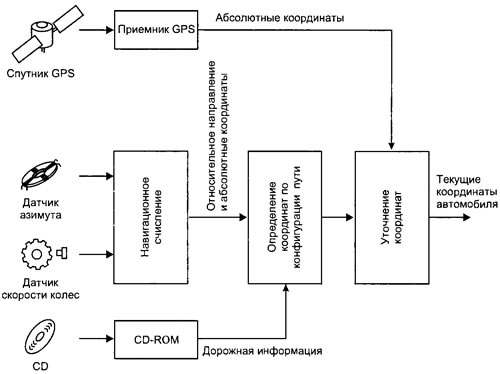
Рис. 5.14. Структура навигационной системы
Конфигурация участка пройденного пути, полученная с помощью навигационного счисления, сравнивается с конфигурацией дорог, нанесенных на карту. Определив дорогу, по которой движется автомобиль, система находит и его текущие координаты. Более точное определение координат автомобиля на карте производится с помощью GPS по широте и долготе. Считается, что для практических целей достаточно знать координаты автомобиля с точностью до размера половины квартала, т. е.±100 метров.
Автомобильная навигационная система должна иметь в своем составе датчики пройденного пути и направления движения.
Датчик пройденного пути — это та или иная конструкция электронного одометра, информация в который поступает с датчиков скорости вращения колес ABS. Одометрам присущ ряд систематических погрешностей, которые необходимо корректировать. К ним относятся:
- 1. Разница в диаметрах новой и изношенной покрышки дает погрешность в определении пройденной дистанции до 3%.
- 2. За счет увеличения диаметра покрышки от центробежной силы на каждые 40 км/час скорости автомобиля погрешность в определении пройденной дистанции увеличивается на 0,1...0,7%.
- 3. Изменение давления в шинах на 689 кПа (10 psi) увеличивает погрешность на 0,25...1,1%.
Для определения направления движения автомобиля обычно используются датчик азимута, датчики скорости вращения колес, гироскопы.
Датчик азимута (компас)
Датчик азимута использует магнитное поле Земли и представляет собой кольцевой сердечник из ферромагнетика, на который намотаны обмотка возбуждения и перпендикулярно друг другу две выходные обмотки (рис. 5.15).
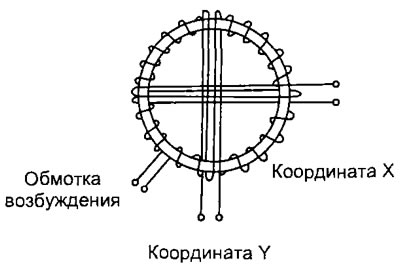
Рис. 5.15. Геомагнитный датчик азимута
К обмотке возбуждения приложено синусоидальное напряжение. При отсутствии внешнего магнитного поля в выходных обмотках наводится ЭДС взаимоиндукции, также синусоидальная, с нулевым средним значением. При наличии постоянного внешнего магнитного поля напряженностью Н (магнитное поле Земли) происходит искажение синусоидальной формы магнитного потока в сердечнике за счет наложения постоянной составляющей и напряжений выходных обмоток (рис. 5.16).
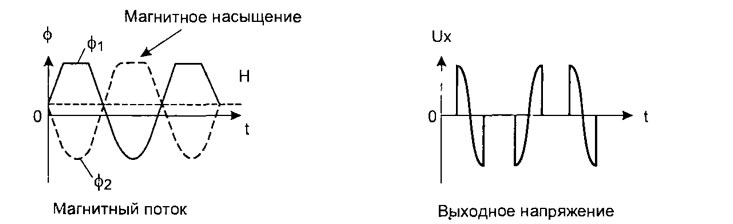
Рис. 5.16. Электромагнитные процессы в геомагнитном датчике азимута в присутствии внешнего магнитного поля Н
Если внешнее магнитное поле направлено под углом θ к обмотке X, то средние значения напряжений в выходных обмотках определятся так:
Vx = kH cos θ
Vy = kH sin θ
где к — коэффициент пропорциональности. Отсюда θ = arctg(Vy/Vx), т. с. направление движения автомобиля определено.
Современные датчики азимута выпускаются в интегральном исполнении.
Датчик скорости вращения колес
Используются датчики скорости вращения передних колес, применяемые и для ABS. Угол поворота автомобиля определяется по разности путей, проходимых при повороте левым и правым колесом. Когда автомобиль поворачивается на угол 0 радиан с радиусом поворота R, пути, пройденные левым и правым колесами, описывают дуги с общим центром (рис. 5.17).
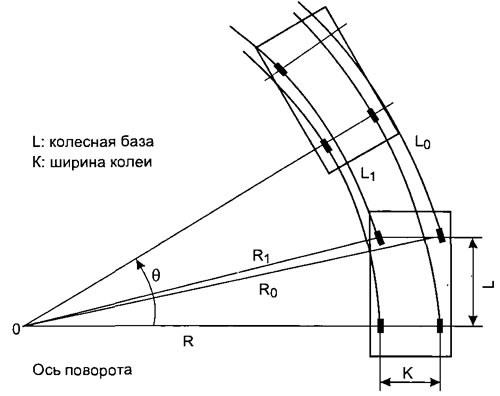
Рис. 5.17. Пути, проходимые правым и левым колесом при повороте
Пути, пройденные левым и правым передними колесами, различны и составляют: L1=R1θ и L0=R0θ. Радиусы этих дуг имеют общий центр и определяются как:
где L — колесная база, а К — ширина колеи.
Введем Р — отношение между протяженностями путей колес на повороте:
Преобразуем это уравнение:
Колесная база L и ширина колеи К известны для данного автомобиля, пути правого и левого колес замеряют с помощью датчиков скорости вращения колес. Тогда угол поворота θ вычисляется по формуле
Сложив все поворотные углы, можно определить и угол поворота автомобиля для заданного пути от стартовой точки:
Гироскоп
При использовании гироскопа определяется угловая скорость автомобиля на повороте и интегрируется для определения угла поворота. В навигационных системах используются различные типы гироскопов, здесь рассматривается применение газового гироскопа.
Устройство работает следующим образом. Насос создает поток гелия с заданной скоростью истечения и направляет его через сопло на две нагретые проволочки датчика. Угловая скорость автомобиля определяется по изменению сопротивлений проволочек датчика. Когда поток гелия выходит из сопла насоса, он постепенно расширяется. Распределение скоростей в потоке газа по сечению возле проволочек показано на рис. 5.18.

Рис. 5.18. Распределение скоростей в потоке газа
Когда автомобиль движется прямо, распределение скоростей симметрично относительно проволочек, они охлаждаются одинаково и на выходе мостовой схемы, частью которой являются проволочки, нулевое напряжение (рис. 5.19). При повороте возникает сила Кориолиса, смещающая газовый поток, проволочки охлаждаются неравномерно, их сопротивления электрическому току различны, на выходе мостовой схемы появляется напряжение, пропорциональное угловой скорости автомобиля на повороте.
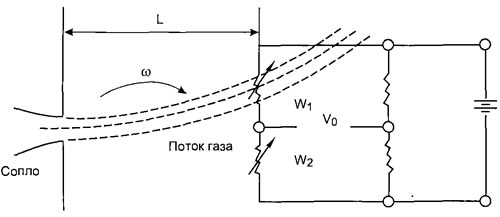
Рис. 5.19. Измерительная схема