
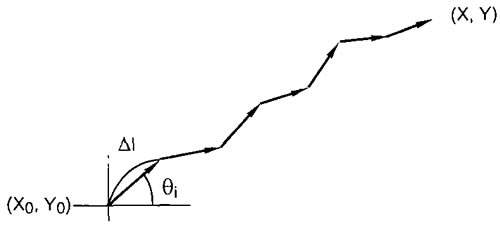
Рис. 5.20. Определение координат автомобиля методом навигационного счисления
Расстояние от стартовой точки (X0, Y0) определяется по следующей системе уравнений:
где ось X обозначает направление «восток — запал», a Y — «север — юг».
Таким образом, текущие координаты автомобиля могут быть определены, если известно положение стартовой точки на карте.
Направление движения автомобиля обычно определяется по геомагнитному датчику азимута (компасу). Корпус автомобиля выполнен из металла и других магнитных материалов и способен намагничиваться внешними полями (например, в магнитном поле, создаваемом электродвигателями электровоза на железнодорожном переезде и т. д.). В этом случае возникает систематическая погрешность в определении направления движения автомобиля. Паразитное магнитное поле компенсируется дополнительными магнитами вблизи компаса.
Магнитное поле также искажается в тоннелях, на металлических мостах, при движении вдоль автопоездов. Применение датчиков скорости вращения колес наряду с компасом часто решает эту проблему. Датчики скорости вращения колес нс чувствительны к таким искажениям, на практике датчики азимута и скорости вращения колес дополняют друг друга при определении направления движения автомобиля.
Навигационное счисление даст низкую точность определения текущих координат объекта. Для автомобиля приходится корректировать координаты, определенные методом навигационного счисления каждые 10...15 км. К счастью, автомобили обычно передвигаются по дорогам, которые нанесены на карту.